
![]() USV Trajectory Planning for Time Varying Motion Goals in an Environment with Obstacles
USV Trajectory Planning for Time Varying Motion Goals in an Environment with Obstacles
PI: Prof. S.K. Gupta
Autonomous Unmanned Surface Vehicles (USVs) have been emerging as an attractive alternative to human-driven boats in a wide variety of missions that require reliable sea navigation. Examples of such missions include harbor patrolling and protecting important assets in vulnerable area, surveillance, environmental monitoring, etc. The USV fulfills its mission through the execution of appropriate behaviors. The behaviors produce motion goals that define the desired locations in the space for the vehicle to reach and planning constraints. Safe, efficient, and reliable following of a time varying motion goal, by the USV in a sea environment with obstacles, is a challenge. The vehicle’s tracking capability is inherently influenced by its dynamics, the motion characteristics of the motion goal, as well as by the configuration of obstacles in the marine environment.
The University of Maryland’s Simulation-Based System Design Laboratory group has developed an intelligent autonomous system for the USV that includes a lattice-based trajectory planner. The planner efficiently computes a dynamically feasible, resolution optimal, collision-free trajectory to reach a motion goal generated by one or more behaviors. A trajectory following controller for the USV has been utilized to achieve high tracking efficiency while still preserving motion safety. The entire approach is based on the developed USV system architecture that encapsulates the necessary trajectory and behavior planning components. We demonstrate the effectiveness of the developed trajectory planner in a simulated, complex environment with static obstacles.
We have developed four behaviors to be able to thoroughly test the planner in different contexts. The developed intelligent behaviors include a follow target boat, rules of the road (COLREGS) crossing, static way point following, and interception behaviors. With the help of the ETC, we have developed a physical evaluation platform to evaluate the performance of the planner in a real environment according to a designed experimental protocol.
The real environment is made up of two RC boats driven in the water tank within the Neutral Buoyancy Research Facility at the University of Maryland College Park. The setup allows us to manually drive one of the boats, using a remote controller while the other boat autonomously follows.
The future plan is to extend the developed trajectory planning approach by a sophisticated motion goal computation technique based on our previous work to be able to make proficient guesses where the target may be within a specified number of planning steps. This will include development of a probabilistic behavior model of the target boat.
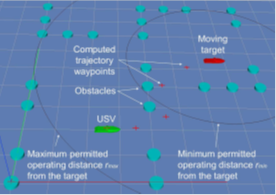
Following a Moving Target Amid Obstacles by an Autonomous Unmanned Surface Vehicle
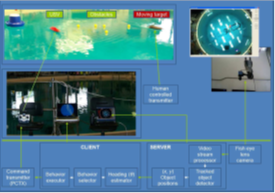
Developed Physical Setup for Testing Autonomous Behaviors in the Neutral Buoyancy Research Facility (NBRF) at the University of Maryland College Park
