
![]() Automated Synthesis of Reactive Behaviors for Autonomous Unmanned Vehicles
Automated Synthesis of Reactive Behaviors for Autonomous Unmanned Vehicles
PI: Prof. Satyandra K. Gupta
Autonomous unmanned vehicles operating on complex terrains in unstructured environments utilize a combination of deliberative and reactive planning. The reactive layer receives tasks from the deliberative layer and autonomously executes the assigned tasks by monitoring the environment, using sensors and sending commands to controllers to carry out the tasks. The reactive layer is designed to respond quickly and safely to changes in the environment or the physical layer. To ensure fast reaction, the reactive layer must provide real-time computation and execution guarantees. Reactive layers in most planning architectures utilize a library of behaviors that can compute vehicle actions quickly for a given state.
Behaviors implicitly or explicitly use an action-selection policy to decide what actions to take in a given state.
Keeping the design of reactive action selection policies tractable requires us to partition the state space into cells. Actions in a state space cell can be determined using the meta-action attached to the cell.
We have also developed a virtual environment-based visualization system which serves as an emulator of the real USSV environment and contains gaming logic which allows human players to play against each other or against the computer. In the game, the player controlling the intruder boat must reach a protected target, while the player controlling the USSV must block and delay the intruder as long as possible. The game logic is responsible for the rules of the game, game logging and replay, boat behaviors, and scoring. The game can be played on two computers over a network. In addition to offering basic gaming capabilities, the visualization system provides collision detection and basic physics to the objects in the scene.
Deployment of autonomous USSVs in critical missions requires that the performance of the autonomous system matches with that of a remote controlled vehicle. We have used the virtual environment based game to compare the automatically discovered decision trees, representing the blocking behavior to the manually coded behavior. The performance of synthesized behavior matches the performance of manually coded behavior.
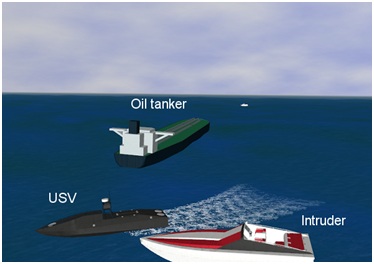
Virtual Environment for Simulating USSV
